集成光子技术——引领高可靠导航技术开启新一轮发展浪潮
近三十年来,全球导航卫星系统(GNSS)一直是支撑现代社会物流、金融、能源与安防体系的不可或缺的核心技术。这类系统的高效性,加之其在各关键领域的广泛应用,使其成为全球重要的基础性技术资源。
与此同时,社会对该系统的高度依赖也形成了一项关键的安全短板。随着人类对 GNSS 信号在精密定位、导航与授时(PNT)方面的需求不断提升,针对 GNSS 的干扰手段在规模和技术复杂度上也同步升级。
这一趋势已然十分明确。近期行业及政府相关报告显示,全球每日发生的 GNSS 干扰与欺骗事件达数百起之多。受低成本通用无线电技术的普及以及地缘政治紧张局势升级的影响,该类事件的数量实现了同比超五倍的增长(见图 1)。

图1 全球导航卫星系统(GNSS)的干扰与欺骗威胁,正对商业及国防领域形成持续升级的影响。(来源:ANELLO Photonics)
此外,这类干扰事件已影响到数千架商业航班与海上船舶,成为商业和国防领域共同关注的问题。2025 年 10 月,卡塔尔交通部在遭遇严重 GPS 信号中断后,史无前例地在全国范围内暂停了海上导航作业。这一举措标志着一个新时代的到来:定位、导航与授时系统的脆弱性,已成为主流的运营与经济风险。如今,水面及空中载具出现定位错误或完全失去定位的情况,早已屡见不鲜。对于自主系统设计者而言,定位、导航与授时的抗干扰能力,已从一项锦上添花的功能,转变为必备的基础要求。
射频信号干扰的实施门槛之低,造就了当前的安全现状。一台小型地面干扰器 —— 售价通常仅数百美元 —— 即可在 L 波段发射高能噪声,使数公里范围内的 GNSS 接收机失效。功率更大或部署位置更高的干扰系统,可形成覆盖数十公里的信号拒止区域。
GNSS 欺骗干扰的应用也日益普遍:这种更具迷惑性的干扰方式,会播发带有可控时间和位置偏差的伪造 GNSS 信号。干扰易被检测,因为接收机仅会失去定位;而欺骗干扰则会制造隐蔽且往往具有灾难性的误导,使 GNSS 接收机计算出一个信号稳定、可信度高但完全错误的位置。此类错误可能导致自主船舶、车辆或无人机被蓄意偏航,甚至驶入危险区域。
这类干扰与欺骗事件的持续时间通常从数分钟到一小时以上,远超当前民用消费电子中主流低成本传感器的航位推算能力(即利用惯性传感器估算位置的能力)。
面向导航领域的硅光子技术
当卫星信号消失时,载具需依靠惯性导航 —— 即通过追踪运动变化计算位置的方式。任何惯性导航系统(INS)的核心都是陀螺仪,该传感器的性能直接决定了系统在失去 GNSS 定位后,能在位置误差过度累积前正常工作的时长。位置误差的累积速度,主要受陀螺仪偏置不稳定性(即漂移)限制,其指标通常以每小时度数(°/h)表示。
数十年来,陀螺仪市场始终存在一个核心性能取舍。一端是微机电系统(MEMS)陀螺仪:这类固态器件体积微小、成本低且功耗低,因此广泛应用于手机等消费电子设备。其利用科里奥利效应感知旋转 —— 受驱振动的检测质量会产生与角速度成正比的正交运动,再通过电学方式解调该信号。
但正是这种振动工作机制,使 MEMS 陀螺仪易受振动、热梯度、声学干扰等环境因素影响;加之其噪声大、偏置不稳定性高(通常为数十至数百 °/h),多重因素会导致位置误差快速累积。这类器件基本无法在 GNSS 信号中断超过数秒的场景下实现有效导航。
高性能光学陀螺仪(如光纤陀螺仪 FOG、环形激光陀螺仪 RLG)则处于市场另一端。这类传统系统性能卓越,偏置不稳定性极低(通常<0.1°/h),可实现真正的战略级导航。其利用萨格纳克效应实现高精度检测:当环形光路发生旋转时,沿光路传播的光会产生微小的光程差,从而对旋转进行高稳定性的绝对测量。在光纤陀螺仪中,旋转会使光的干涉图样发生与角速度成正比的偏移;在环形激光陀螺仪中,旋转会让两个反向传播的光束产生微小频率差,形成与角速度成正比的拍频信号。这类传感器稳定性极佳,但代价不菲:光纤陀螺仪和环形激光陀螺仪体积大、重量沉、功耗高且制造成本昂贵,因此仅应用于潜艇、卫星、战斗机、民航客机等大型高价值装备。
低成本低性能的 MEMS 陀螺仪,与高成本高性能的光纤 / 环形激光陀螺仪之间的性能鸿沟,使得自主系统市场的一大部分领域,始终缺乏可靠、长时程的航位推算及无 GPS 导航解决方案。
近年来,集成光子系统与设计的技术突破正改变这一格局,得以将复杂光学系统微型化集成至单枚硅芯片,同时实现精密应用所需的性能指标。ANELLO Photonics 公司的硅光子光学陀螺仪(SiPhOG)正是这一技术方向的典型代表。通过采用 CMOS 兼容工艺制造微型波导、调制器、偏振滤波器、分光器、耦合器和探测器,光学陀螺仪的尺寸、重量、功耗与成本(SWaP-C)负担得以大幅降低。
硅光子光学陀螺仪将光学陀螺仪集成于硅光子芯片,实现了紧凑、高可靠性的硬件形态,偏置不稳定性<0.5°/h(图 2)。该器件既保留了赋予光学陀螺仪高稳定性、高性能的萨格纳克效应核心物理原理,又充分利用了硅光子技术的可扩展性与高可靠性优势。
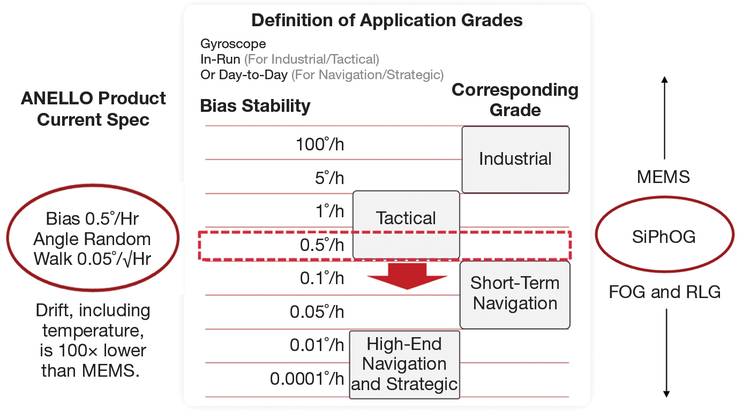
图 2 硅光子陀螺仪(SiPhOG)填补了不同应用等级陀螺仪之间的性能鸿沟。(来源:ANELLO Photonics)
无人系统:应用案例分析
集成光子技术赋能的定位、导航与授时传感技术,其落地应用潜力在海事领域体现得尤为鲜明。无人水面艇(USVs)与无人水下航行器(UUVs)如今愈发频繁地被指派执行争议海域内的关键长时程任务,涵盖水下基础设施巡检、国家安全行动等场景。对于这类装备而言,实时可靠的定位能力是不可或缺的核心需求。
ANELLO 公司研发的海事惯性导航系统(INS),为该技术的实际应用提供了极具参考价值的案例。该系统以三台硅光子陀螺仪(SiPhOG)为核心,搭配三频双天线全球导航卫星系统(GNSS)接收机,并集成了一款专为海事作业的动态特性与实际挑战设计的高精度传感器融合引擎(图 3)。
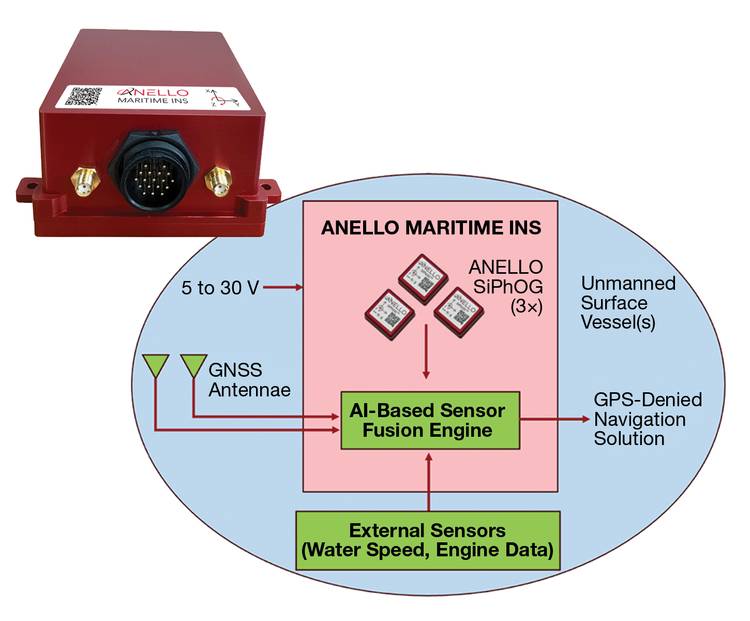
图3 ANELLO海事惯性导航系统(INS)产品实物及系统架构图(右侧为其基于人工智能的传感器融合引擎)。(来源:ANELLO Photonics)
在这类实际部署中,技术的创新点不仅体现在惯性数据的采集精度,更在于打造了能整合所有可用信息的智能融合层。该系统的融合引擎采用融合机器学习技术的扩展卡尔曼滤波器(EKF),持续测算船舶的位置、速度与姿态(横摇、纵摇及航向)。这一传感器融合引擎接收各类辅助传感器的输入数据,通过持续学习构建环境因素模型并对其影响进行补偿。例如,系统可通过简易的一维桨轮或超声波传感器采集的对水航速数据,习得当地的海流矢量;通过持续对海流情况进行估算,系统能精准区分真实的惯性漂移与海流推动造成的船舶位置偏移,从而在 GNSS 信号中断时,可靠依托低漂移的硅光子陀螺仪(SiPhOG)实现导航,不受环境因素的干扰。
对于无人水下航行器(UUV)和部分无人水面艇(USV)而言,多普勒计程仪是性能更优的辅助传感设备。该设备通过向海底发射声学信号,可独立于海流检测船舶的对地速度;尽管多普勒计程仪的 “海底锁定” 功能通常仅在距海底不超过 100 米的范围内有效,但其与基于硅光子陀螺仪(SiPhOG)的低漂移惯性导航系统相结合,能大幅降低航位推算的误差。
除上述传统辅助传感设备外,这套高可靠性的定位、导航与授时(PNT)架构还支持整合各类即取式传感器。系统可接入视觉导航功能,通过摄像头识别海图标注的地标完成定位;也可在天气晴朗时,借助天文导航(或星敏感器)实现粗略的位置更新。这种分层式的高抗干扰设计,能确保单一辅助传感设备临时失效时,任务的执行不会受到影响。
基于这一设计思路,ANELLO 海事惯性导航系统的传感器融合引擎可接收各类异构数据,并将其作为周期性的更新依据,在 GNSS 信号长期中断的情况下,有效约束核心惯性导航解的漂移误差。
复杂对抗环境下的实测表现
导航系统的终极检验标准,是实际场景中的性能表现。这款海事惯性导航系统及其搭载的硅光子技术,已通过大量客户测试、实机演示与海外部署验证,充分展现出优异的抗干扰性能(见图 4、图 5)。相关海上试验依托多款无人水面艇开展,试验落地于罗德岛州纽波特市的 BlueTIDE、加利福尼亚州圣地亚哥市的 AFCEA 西部展、夏威夷州火奴鲁鲁市的 “融合项目” 以及密歇根州阿尔皮纳市的 “静默蜂群” 等多个场景;所有试验用无人水面艇均仅搭载一维对水航速传感器,在不同海况、不同航速条件下,完成了数分钟至数小时不等的 GNSS 信号中断测试。
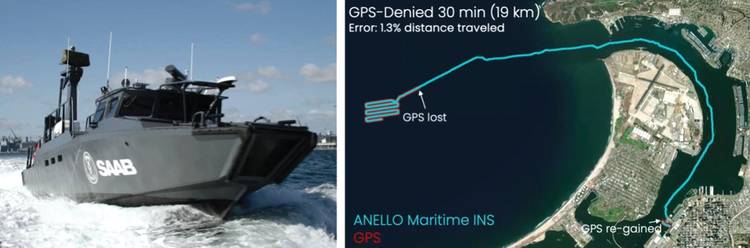
图 4 2025 年圣地亚哥 AFCEA 西部展上,ANELLO 基于硅光子陀螺仪(SiPhOG)的海事惯性导航系统在萨博 Enforcer 3.1 无人艇上完成无全球导航卫星系统(GNSS)信号演示。(来源:ANELLO Photonics)
无 GNSS 信号下的导航性能通常以行程距离误差百分比(% DT) 为衡量指标,该指标可对不同航速、不同任务时长下的误差进行标准化评估。在30 节以上高速航行场景中,即便完全失去 GNSS 信号长达数十分钟,系统航位推算误差也仅为行程距离的 1%~2%;此航速下,船舶的快速动态特性能够抵消航速传感器的噪声影响,海流估算误差的作用也相对较小。在10~30 节的常规航行速度下,系统定位精度可稳定保持在行程距离的 2%~3% 以内。
最具挑战性的场景为4~10 节低速航行的小型船舶,此时航速传感器的偏置误差与未建模的海流影响会成为误差的主要来源;但即便在该场景下,仅依靠简易桨轮传感器作为辅助,系统仍能稳定将定位误差控制在行程距离的 3%~5% 范围内。
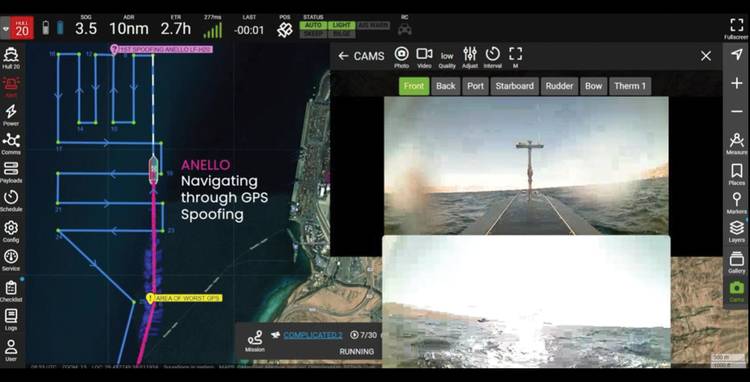
图5 ANELLO基于硅光子陀螺仪(SiPhOG)的海事惯性导航系统,搭载于Seasats公司Lightfish无人水面艇,在中东地区实际GNSS干扰与欺骗环境中完成导航作业。(来源:ANELLO Photonics)
这些性能不仅在各类演示中得到验证,更通过在中东等海外地区的成功部署得到实战检验,助力无人水面艇在真实的 GNSS 干扰与欺骗环境中实现可靠导航。
面向系统设计者的发展展望
这款基于硅光子技术的海事惯性导航系统的成功落地,标志着高可靠导航技术迈入发展拐点。历经数十年发展,集成硅光子技术已日趋成熟,晶圆级制造与封装技术的持续突破,为 ANELLO 实现芯片级形态的光学级惯性导航性能奠定了核心基础,最终让无 GNSS 导航能力得以集成到更小、对成本更敏感的设备平台中。
对于设计下一代自主系统的工程师与操作人员而言,核心启示十分明确:第一,GNSS 信号不能再被视作稳定可用的基础资源,将应对信号中断、衰减与欺骗的高可靠运行方案,纳入系统架构的核心设计考量,已是必然要求;第二,陀螺仪的选型直接决定系统抗干扰导航的有效时长 ——MEMS 陀螺仪仅能满足数秒级的信号中断场景,而要实现数分钟乃至数小时的无信号导航,必须采用光学级惯性传感器。
第三,集成硅光子技术从根本上打破了性能与尺寸、重量、功耗、成本(SWaP-C) 之间的固有取舍。借助该技术,系统设计者可将高性能航位推算能力,集成到更多类型的无人海事、航空、地面载具中,且不会牺牲任务有效载荷与续航能力。
随着自主系统向更复杂、对抗性更强的环境拓展,无论是否有卫星信号,都能让海、空、陆各类载具实现高置信度导航,将成为未来自主系统实现高效、可靠运行的核心特征。
资讯来源:https://www.photonics.com
- 收藏

